Unser Ziel ist es, ein Modellflugzeug so umzubauen, dass es autonom fliegen kann. Dafür entwickeln wir einen eigenen Flightcontroller, Software und Hardware, sodass das Flugzeug eigenständig Starten, Landen und Wegpunkte ansteuern kann. Außerdem entwickeln wir eine eigene Fernsteuerung um das Flugzeug über LoRa zu steuern.
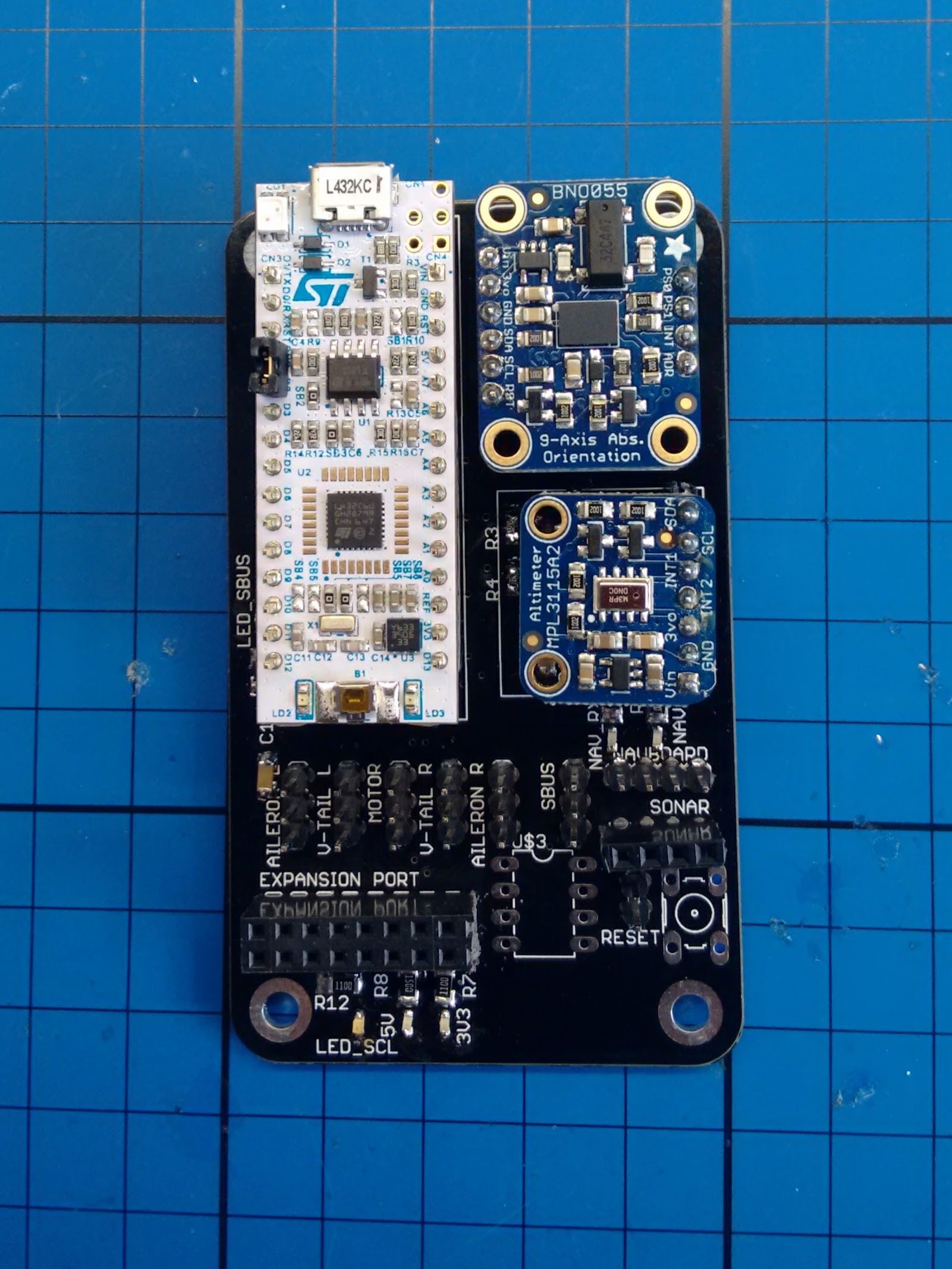
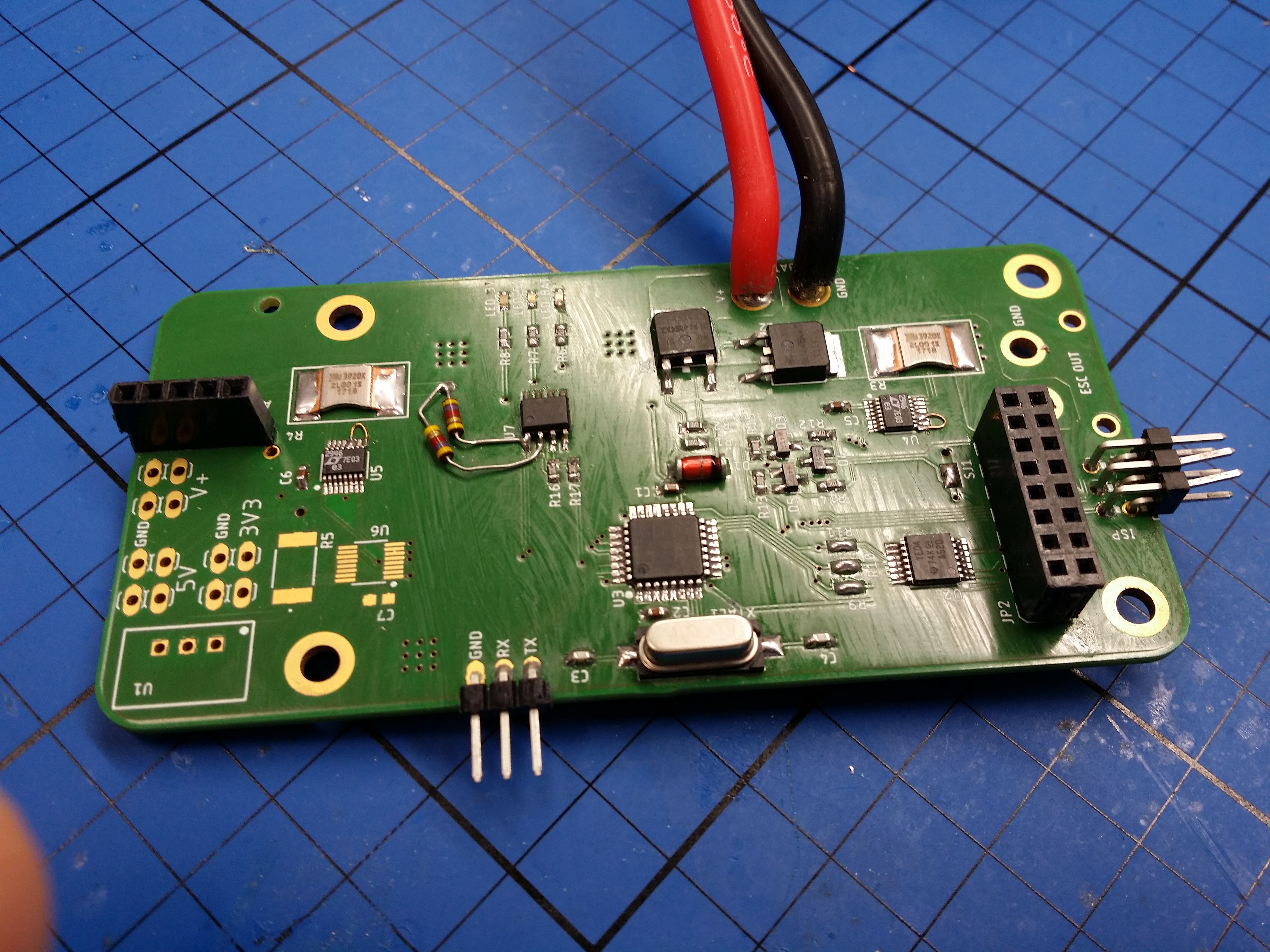
Komponenten: Flightcontroller: Eigenes Breakout Board für das “Nucleo L432KC” Microcontrollerboard, mit BNO055 Lagesensor und barometrischem Höhenmessgerät. Dieser übernimmt Regelung und Ansteuerung der Servos. Raspberry Pi: Übernimmt Kommunikation mit der Basisstation über LoRa, Routenplanung / GPS mittels Dragino LoRa/GPS Hat. Flugzeug: Modell “Mini Talon” PowerDeliveryBoard: Befindet sich momentan in Entwicklung, soll dem Flightcontroller Daten zur Stromversorgung bereitstellen.
Mehr Informationen, Quellcode und Platinenlayouts sind auf GitHub zu finden: github.com/ToolboxPlane