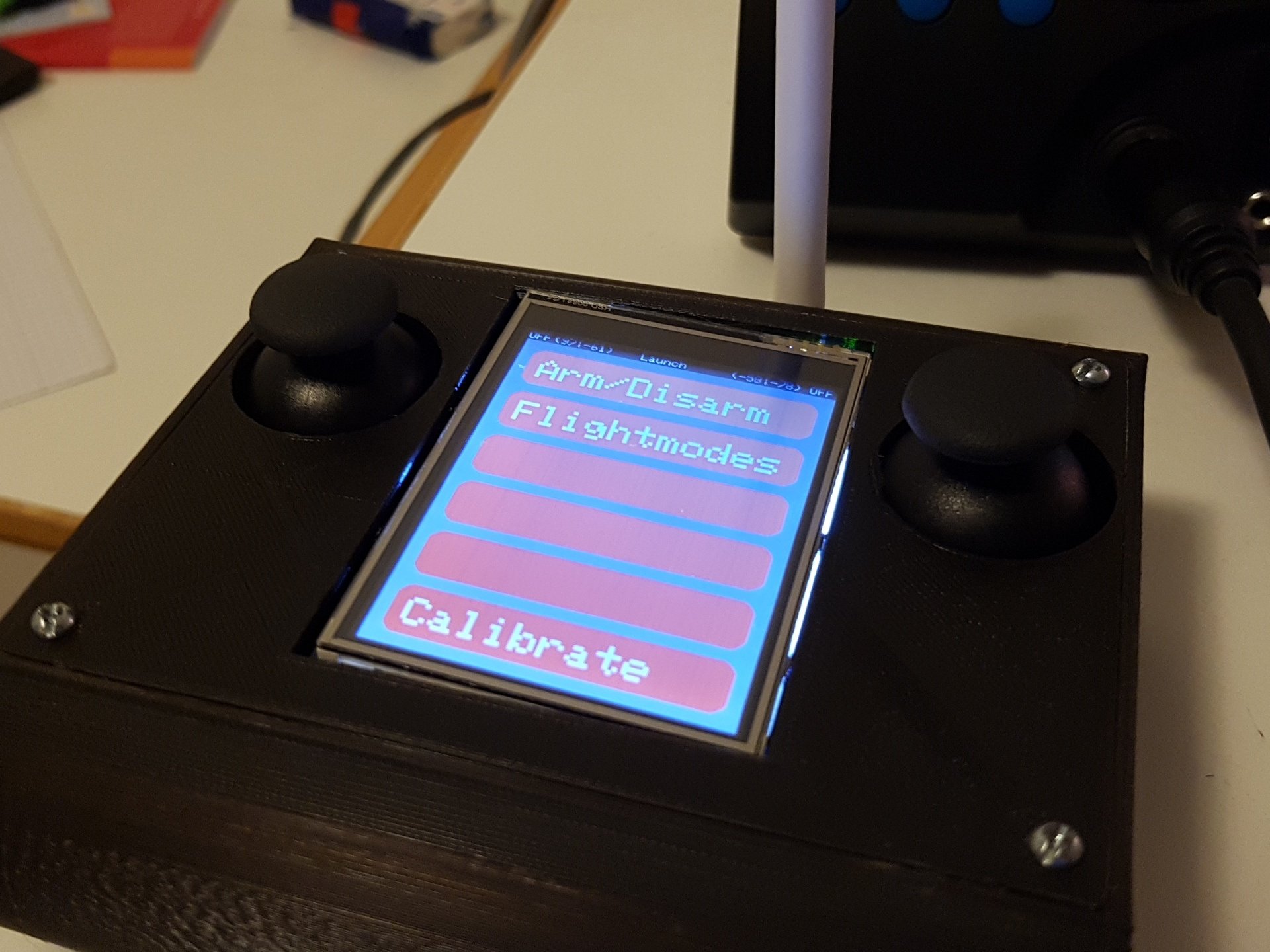
Our goal is to alter a model plane to make it fly autonomously. In order to do so, we develop an own flight controller, software and hardware so that the plane can take off, land and head to specific route points. Furthermore, we develop an own remote control to control the plane via LoRa.
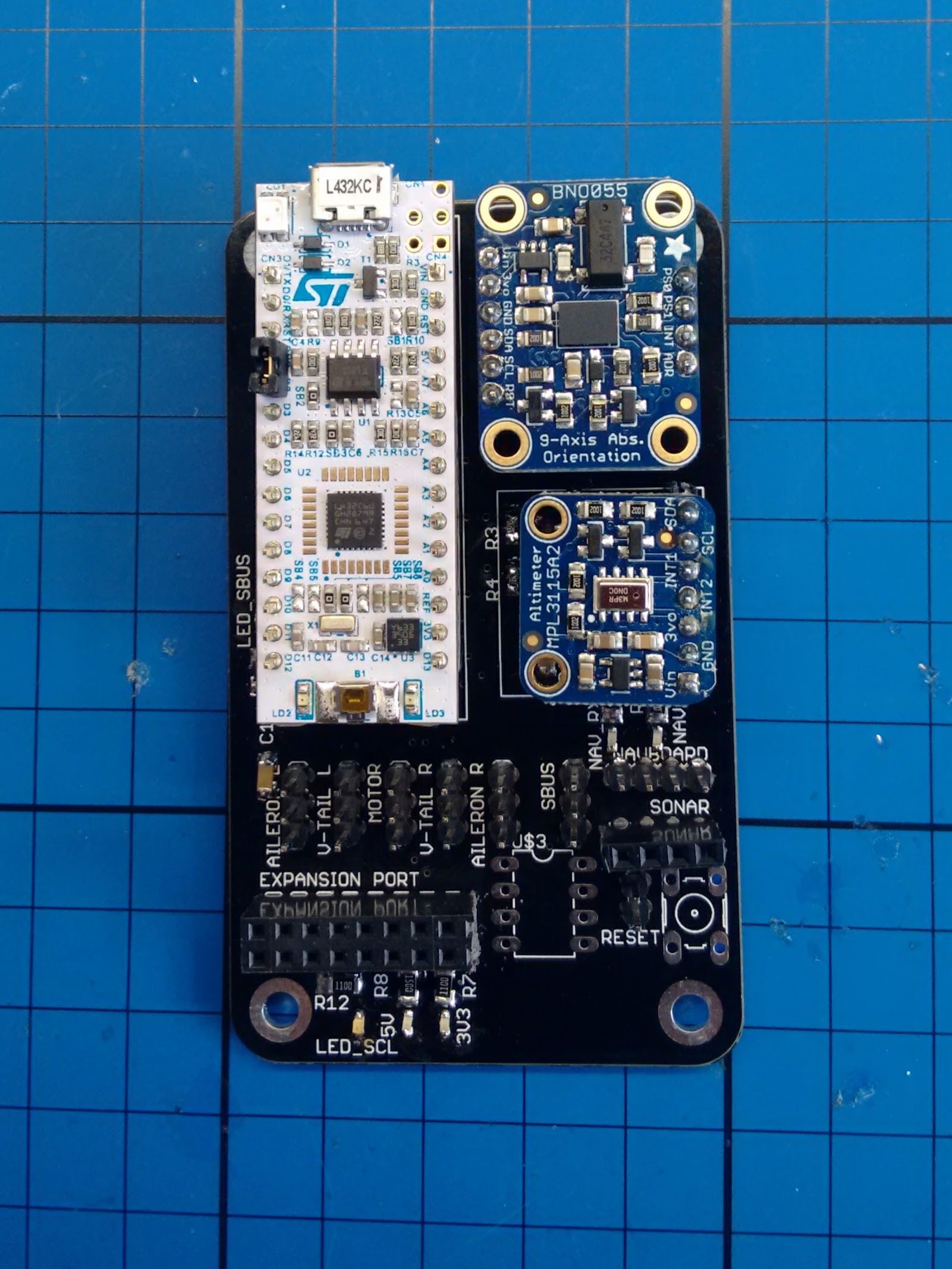
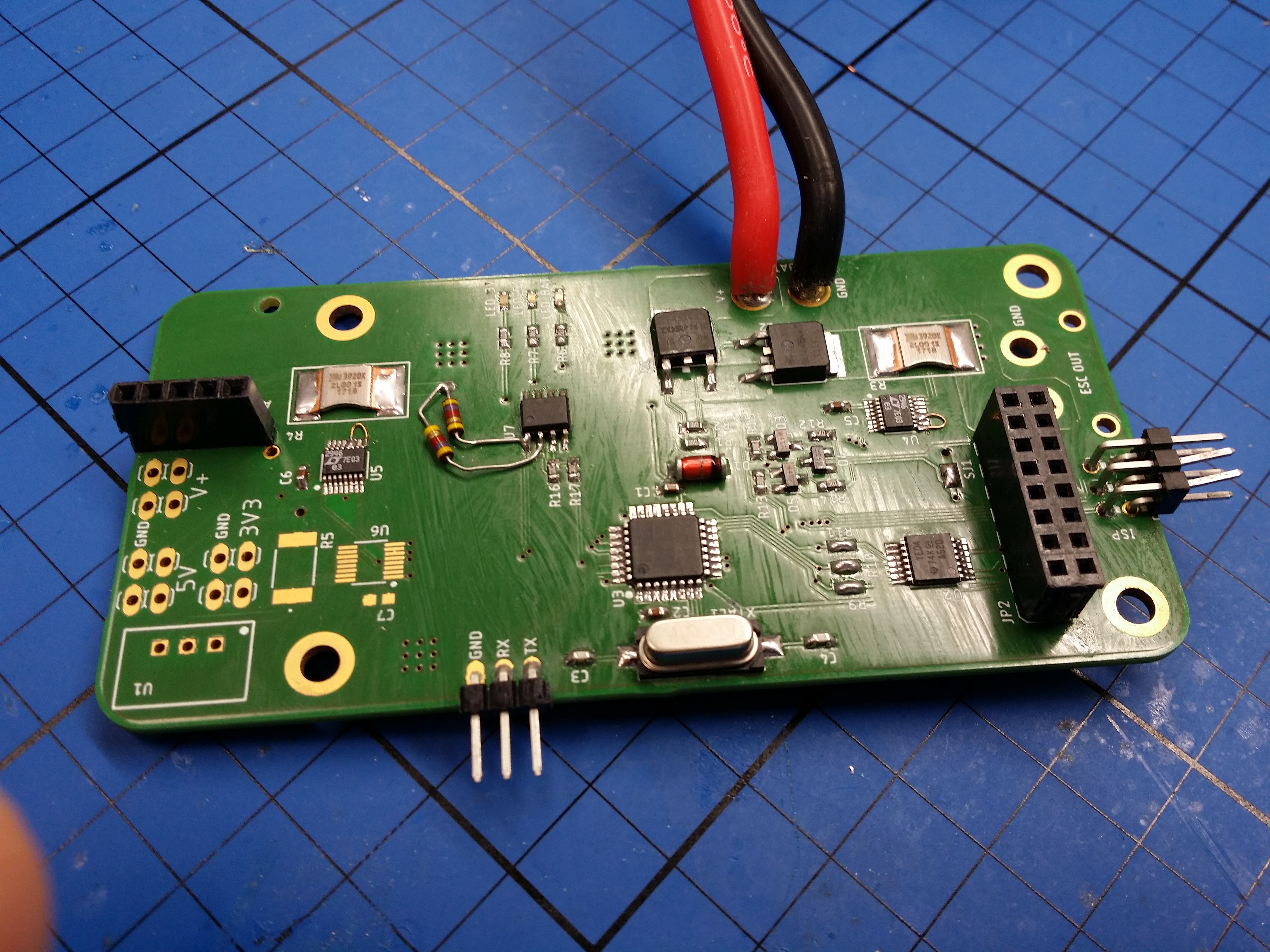
Components: Flight controller: Own Breakout Board for the “Nucleo L432KC” microcontroller board with BNO055 position sensor and barometric altimeter. It regulates and contols the servo. Raspberry Pi: Is responsible for the communication with the base station via LoRa, route planning / GPS via Dragino LoRa/GPS Hat. Plane: Model “Mini Talon” PowerDeliveryBoard: Currently in development, shall provide power supply data to the flight controller.
More information, source code and PCB layouts are available here: github.com/ToolboxPlane